
The efficient way to publish multi-arch containers from GitHub Actions

Learn how to publish container images for both Arm and Intel machines from GitHub Actions.
In 2017, I wrote an article on multi-stage builds with Docker, and it's now part of the Docker Documentation. In my opinion, multi-arch builds were the proceeding step in the evolution of container images.
What's multi-arch and why should you care?
If you want users to be able to use your containers on different types of computer, then you'll often need to build different versions of your binaries and containers.
The faas-cli tool is how users interact with OpenFaaS.
It's distributed in binary format for users, with builds for Windows, MacOS and Linux.
linux/amd64,linux/arm64,linux/arm/v7darwin/amd64,darwin/arm64windows/amd64
But why are there six different binaries for three Operating Systems? With the advent of Raspberry Pi, M1 Macs (Apple Silicon) and AWS Graviton servers, we have had to start building binaries for more than just Intel systems.
If you're curious how to build multi-arch binaries with Go, you can check out the release process for the open source arkade tool here, which is a simpler example than faas-cli: arkade Makefile and GitHub Actions publish job
So if we have to support at least six different binaries for Open Source CLIs, what about container images?
Do we need multi-arch containers too?
Until recently, it was common to hear people say: "I can't find any containers that work for Arm". This was because the majority of container images were built only for Intel. Docker Inc has done a sterling job of making their "official" images work on different platforms, that's why you can now run docker run -t -i ubuntu /bin/bash on a Raspberry Pi, M1 Mac and your regular PC.
Many open source projects have also caught on to the need for multi-arch images, but there are still a few like Bitnami, haven't yet seen value. I think that is OK, this kind work does take time and effort. Ultimately, it's up to the project maintainers to listen to their users and decide if they have enough interest to add support for Arm.
A multi-arch image is a container that will work on two or more different combinations of operating system and CPU architecture.
Typically, this would be:
linux/amd64- "normal" computers made by Intel or AMDlinux/arm64- 64-bit Arm servers like AWS Graviton or Ampere Altralinux/arm/v7- the 32-bit Raspberry Pi Operating System
So multi-arch is really about catering for the needs of Arm users. Arm hardware platforms like the Ampere Altra come with 80 efficient CPU cores, have a very low TDP compared to traditional Intel hardware, and are available from various cloud providers.
How do we build multi-arch containers work?
There are a few tools and tricks that we can combine together to take a single Dockerfile and output an image that anyone can pull, which will be right for their machine.
Let's take the: ghcr.io/inlets-operator:latest image from inlets.
When a user types in docker pull, or deploys a Pod to Kubernetes, their local containerd daemon will fetch the manifest file and inspect it to see what SHA reference to use for to download the required layers for the image.
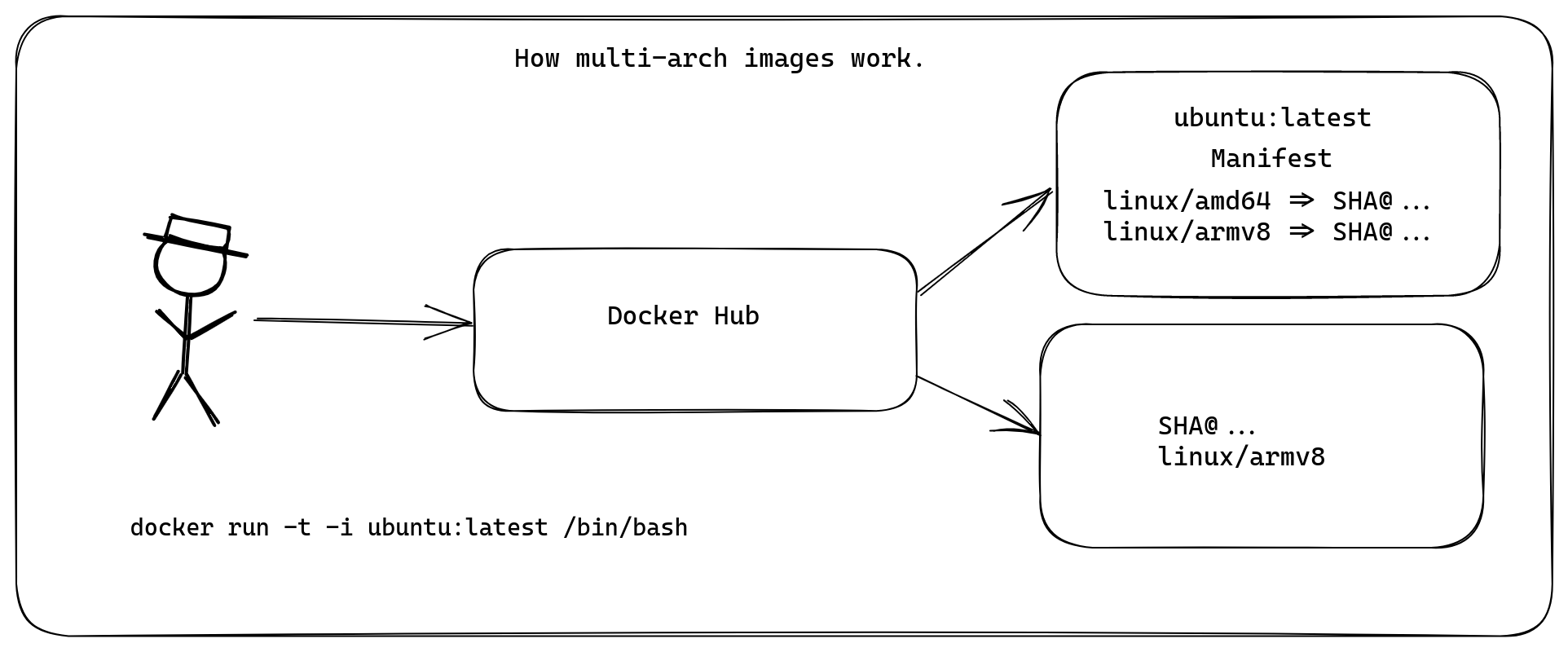
How manifests work
Let's look at a manifest file with the crane tool. I'm going to use arkade to install crane:
arkade get crane
crane manifest ghcr.io/inlets/inlets-operator:latest
You'll see a manifests array, with a platform section for each image:
{
"mediaType": "application/vnd.docker.distribution.manifest.list.v2+json",
"manifests": [
{
"mediaType": "application/vnd.docker.distribution.manifest.v2+json",
"digest": "sha256:bae8025e080d05f1db0e337daae54016ada179152e44613bf3f8c4243ad939df",
"platform": {
"architecture": "amd64",
"os": "linux"
}
},
{
"mediaType": "application/vnd.docker.distribution.manifest.v2+json",
"digest": "sha256:3ddc045e2655f06653fc36ac88d1d85e0f077c111a3d1abf01d05e6bbc79c89f",
"platform": {
"architecture": "arm64",
"os": "linux"
}
}
]
}
How do we convert a Dockerfile to multi-arch?
Instead of using the classic version of Docker, we can enable the buildx and Buildkit plugins which provide a way to build multi-arch images.
We'll continue with the Dockerfile from the open source inlets-operator project.
Within the Dockerfile, we need to make a couple of changes.
- FROM golang:1.18 as builder
+ FROM --platform=${BUILDPLATFORM:-linux/amd64} golang:1.18 as builder
+ ARG TARGETPLATFORM
+ ARG BUILDPLATFORM
+ ARG TARGETOS
+ ARG TARGETARCH
The BUILDPLATFORM variable is the native architecture and platform of the machine performing the build, this is usually amd64.
The TARGETPLATFORM is important for the final step of the build, and will normally be injected based upon one each of the platforms you have specified for the build command.
For Go specifically, we also updated the go build command to tell Go to use cross-compilation based upon the TARGETOS and TARGETARCH environment variables, which are populated by Docker.
- go build -o inlets-operator
+ GOOS=${TARGETOS} GOARCH=${TARGETARCH} go build -o inlets-operator
Here's the full example:
FROM --platform=${BUILDPLATFORM:-linux/amd64} golang:1.18 as builder
ARG TARGETPLATFORM
ARG BUILDPLATFORM
ARG TARGETOS
ARG TARGETARCH
ARG Version
ARG GitCommit
ENV CGO_ENABLED=0
ENV GO111MODULE=on
WORKDIR /go/src/github.com/inlets/inlets-operator
# Cache the download before continuing
COPY go.mod go.mod
COPY go.sum go.sum
RUN go mod download
COPY . .
RUN CGO_ENABLED=${CGO_ENABLED} GOOS=${TARGETOS} GOARCH=${TARGETARCH} \
go test -v ./...
RUN CGO_ENABLED=${CGO_ENABLED} GOOS=${TARGETOS} GOARCH=${TARGETARCH} \
go build -ldflags "-s -w -X github.com/inlets/inlets-operator/pkg/version.Release=${Version} -X github.com/inlets/inlets-operator/pkg/version.SHA=${GitCommit}" \
-a -installsuffix cgo -o /usr/bin/inlets-operator .
FROM --platform=${BUILDPLATFORM:-linux/amd64} gcr.io/distroless/static:nonroot
LABEL org.opencontainers.image.source=https://github.com/inlets/inlets-operator
WORKDIR /
COPY --from=builder /usr/bin/inlets-operator /
USER nonroot:nonroot
CMD ["/inlets-operator"]
How to do you configure GitHub Actions to publish multi-arch images?
Now that the Dockerfile has been configured, it's time to start working on the GitHub Action.
This example is taken from the Open Source inlets-operator. It builds a container image containing a Go binary and uses a Dockerfile in the root of the repository.
View publish.yaml, adapted for actuated:
name: publish
on:
push:
tags:
- '*'
jobs:
publish:
+ permissions:
+ packages: write
- runs-on: ubuntu-latest
+ runs-on: actuated
steps:
- uses: actions/checkout@master
with:
fetch-depth: 1
+ - name: Setup mirror
+ uses: self-actuated/hub-mirror@master
- name: Get TAG
id: get_tag
run: echo TAG=${GITHUB_REF#refs/tags/} >> $GITHUB_ENV
- name: Get Repo Owner
id: get_repo_owner
run: echo "REPO_OWNER=$(echo ${{ github.repository_owner }} | tr '[:upper:]' '[:lower:]')" > $GITHUB_ENV
+ - name: Set up QEMU
+ uses: docker/setup-qemu-action@v2
+ - name: Set up Docker Buildx
+ uses: docker/setup-buildx-action@v2
- name: Login to container Registry
uses: docker/login-action@v2
with:
username: ${{ github.repository_owner }}
password: ${{ secrets.GITHUB_TOKEN }}
registry: ghcr.io
- name: Release build
id: release_build
uses: docker/build-push-action@v4
with:
outputs: "type=registry,push=true"
provenance: false
+ platforms: linux/amd64,linux/arm/v6,linux/arm64
build-args: |
Version=${{ env.TAG }}
GitCommit=${{ github.sha }}
tags: |
ghcr.io/${{ env.REPO_OWNER }}/inlets-operator:${{ github.sha }}
ghcr.io/${{ env.REPO_OWNER }}/inlets-operator:${{ env.TAG }}
ghcr.io/${{ env.REPO_OWNER }}/inlets-operator:latest
All of the images and corresponding manifest are published to GitHub's Container Registry (GHCR). The action itself is able to authenticate to GHCR using a built-in, short-lived token. This is dependent on the "permissions" section and "packages: write" being set.
You'll see that we added a Setup mirror step, this explained in the Registry Mirror example and is not required for Hosted Runners.
The docker/setup-qemu-action@v2 step is responsible for setting up QEMU, which is used to emulate the different CPU architectures.
The docker/build-push-action@v4 step is responsible for passing in a number of platform combinations such as: linux/amd64 for cloud, linux/arm64 for Arm servers and linux/arm/v6 for Raspberry Pi.
What if you're not using GitHub Actions?
The various GitHub Actions published by the Docker team are a great way to get started, but if you look under the hood, they're just syntactic sugar for the Docker CLI.
export DOCKER_CLI_EXPERIMENTAL=enabled
# Have Docker download the latest buildx plugin
docker buildx install
# Create a buildkit daemon with the name "multiarch"
docker buildx create \
--use \
--name=multiarch \
--node=multiarch
# Install QEMU
docker run --rm --privileged \
multiarch/qemu-user-static --reset -p yes
# Run a build for the different platforms
docker buildx build \
--platform=linux/arm64,linux/amd64 \
--output=type=registry,push=true --tag image:tag .
For OpenFaaS users, we do all of the above any time you type in faas-cli publish and the faas-cli build command just runs a regular Docker build, without any of the multi-arch steps.
If you're interested, you can checkout the code here: publish.go.
Putting it all together
- CLIs are published for many different combinations of OS and CPU, but containers are usually only required for Linux with an amd64 or Arm CPU.
- Multi-arch images work through a manifest, which then tells containerd which image is needs for the platform it is running on.
- QEMU is a tool for emulating different CPU architectures, and is used to build the images for the different platforms.
In our experience with OpenFaaS, inlets and actuated, once you have converted one or two projects to build multi-arch images, it becomes a lot easier to do it again, and make all software available for Arm servers.
You can learn more about Multi-platform images in the Docker Documentation.
Want more multi-arch examples?
OpenFaaS uses multi-arch Dockerfiles for all of its templates, and the examples are freely available on GitHub including Python, Node, Java and Go.
See also: OpenFaaS templates
A word of caution
QEMU can be incredibly slow at times when using a hosted runner, where a build takes takes 1-2 minutes can extend to over half an hour. If you do run into that, one option is to check out actuated or another solution, which can build directly on an Arm server with a securely isolated Virtual Machine.
In How to make GitHub Actions 22x faster with bare-metal Arm, we showed how we decreased the build time of an open-source Go project from 30.5 mins to 1.5 mins. If this is the direction you go in, you can use a matrix-build instead of a QEMU-based multi-arch build.
See also: Recommended bare-metal Arm servers